Optimal HDR reconstruction with linear digital camerasM. Granados B. Ajdin M. Wand C. Theobalt H.-P. Seidel H. P. A. Lensch MPI Informatik, Universität Ulm
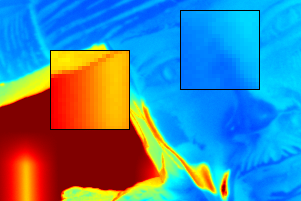
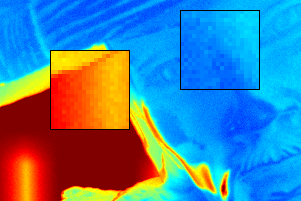
AbstractGiven a multi-exposure sequence of a scene, our aim is to recover the absolute irradiance falling onto a linear camera sensor. The established approach is to perform a weighted average of the scaled input exposures. However, there is no clear consensus on the appropriate weighting to use. We propose a weighting function that produces statistically optimal estimates under the assumption of compound-Gaussian noise. Our weighting is based on a calibrated camera model that accounts for all noise sources. This model also allows us to simultaneously estimate the irradiance and its uncertainty. We evaluate our method on simulated and real world photographs, and show that we consistently improve the signal-to-noise ratio over previous approaches. Finally, we show the effectiveness of our model for optimal exposure sequence selection and HDR image denoising. PaperDatasetSource codeOptimal exposure estimation: public_topt.tar.gz (requires Octave, and pfstools) HDR reconstruction: public_opthdr.tar.gz (requires Matlab, and the Image processing toolbox) Camera sensor calibration: calibration.tar.gz (requires OpenCV 2.3.x) |
 This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License |