Eurographics 2014 |
||
Interactive Motion Mapping for Real-time Character Control |
| Helge Rhodin1 | James Tompkin1,2 | Kwang In Kim1,3 | Kiran Varanasi1,4 | Hans-Peter Seidel1 | Christian Theobalt1 |
| 1MPI für Informatik | 2Intel Visual Computing Institute | 3Lancaster University | 4Technicolor Research |
 |
| Abstract | |
It is now possible to capture the 3D motion of the human body on consumer hardware and to puppet in real time skeleton-based virtual characters.
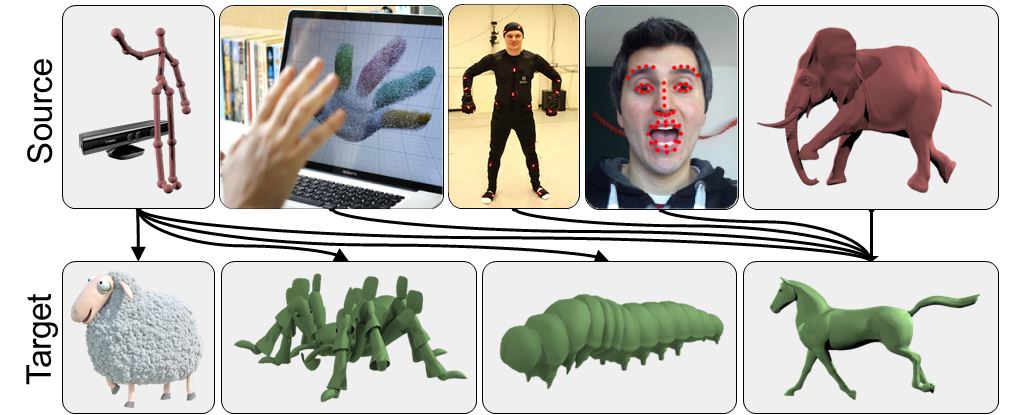
However, many characters do not have humanoid skeletons. Characters such as spiders and caterpillars do not have boned skeletons at all, and these characters have very different shapes and motions. In general, character control under arbitrary shape and motion transformations is unsolved - how might these motions be mapped?
We control characters with a method which avoids the rigging-skinning pipeline --- source and target characters do not have skeletons or rigs. We use interactively-defined sparse pose correspondences to learn a mapping between arbitrary 3D point source sequences and mesh target sequences. Then, we puppet the target character in real time.
We demonstrate the versatility of our method through results on diverse virtual characters with different input motion controllers.
|
@article{Rhodin:2014,
author = {Rhodin, Helge and Tompkin, James and Kim, Kwang In and Varanasi Kiran and
Seidel, Hans-Peter and Theobalt, Christian}
title = {Interactive Motion Mapping for Real-time Character Control},
journal = {Computer Graphics Forum (Proceedings Eurographics)},
volume = {33},
number = {2},
year = {2014},
keywords = {Motion mapping, character control, datadriven real-time control},
}
|
|


|
Supplemental Video MP4 (50 MB) | YouTube |
| Computer Graphics Forum © 2014 The Eurographics Association and Blackwell Publishing Ltd. Published by Blackwell Publishing, 9600 Garsington Road, Oxford OX4 2DQ, UK and 350 Main Street, Malden, MA 02148, USA. This is the author's version of the work. It is posted here by permission of EUROGRAPHICS / Blackwell Publishing for your personal use. Not for redistribution. The definitive version was published in at http://diglib.eg.org and http://onlinelibrary.wiley.com |